
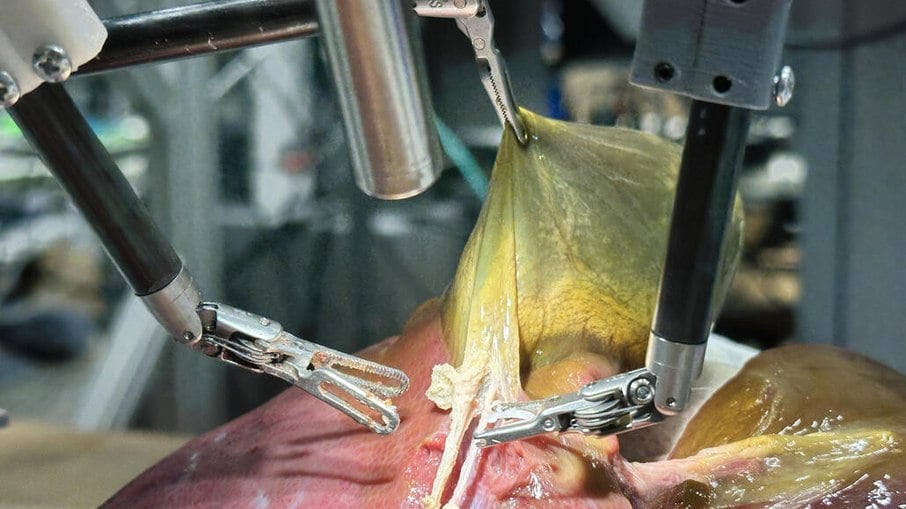

Um robô cirúrgico operando um porco sem vida
Um robô treinado por pesquisadores da Universidade Johns Hopkins, nos Estados Unidos, realizou pela primeira vez, de forma autônoma e sem interferência humana direta, uma etapa longa da cirurgia de retirada de vesícula biliar em um cadáver de porco, simulando um procedimento médico real.
A operação foi conduzida com base em vídeos de cirurgias anteriores e comandos de voz da equipe, permitindo que o sistema aprendesse e se adaptasse em tempo real, como um residente em treinamento.
O estudo, publicado nesta terça-feira (08) na revista Science Robotics, é considerado um marco na evolução da robótica cirúrgica.
O robô, chamado SRT-H(Hierarchical Surgical Robot Transformer), executou o procedimento com precisão comparável à de um cirurgião experiente, mesmo diante de variações anatômicas e imprevistos simulados, como mudanças no ponto de partida da cirurgia ou a inserção de corantes semelhantes a sangue.
Avanço na compreensão de procedimentos
Desenvolvido com a mesma arquitetura de aprendizado de máquina que sustenta o ChatGPT, o SRT-H é capaz de interpretar imagens em tempo real e responder a comandos verbais, como “ agarre a cabeça da vesícula biliar ” ou “ mova o braço esquerdo um pouco para a esquerda ”.
Segundo o pesquisador Axel Krieger, líder do projeto, essa nova geração de robôs cirúrgicos representa uma mudança de paradigma. “ Saímos de robôs que executam tarefas específicas para máquinas que realmente compreendem procedimentos cirúrgicos ”, afirmou.
Em 2022, a equipe de Krieger já havia feito história ao realizar a primeira cirurgia autônoma em um animal vivo, mas o robô anterior operava apenas em condições altamente controladas. Já o novo sistema aprendeu a realizar a cirurgia observando vídeos de cirurgiões humanos operando cadáveres de porco.
Os vídeos, com 17 horas de duração e 16 mil movimentos cirúrgicos, foram acompanhados de legendas descritivas para reforçar o treinamento. Após isso, o robô realizou o procedimento completo oito vezes, com sucesso em todas as 17 etapas necessárias, como localizar e prender dutos e artérias antes de fazer os cortes.
Capacidade de autocorreção e interação
O robô também demonstrou capacidade de autocorreção. Em cada cirurgia, fez em média seis ajustes por conta própria, como quando uma pinça não conseguiu segurar uma artéria de primeira.
Em outro momento, precisou solicitar que um humano trocasse seu instrumento cirúrgico. Apesar dessas interações, o restante do processo foi conduzido de forma independente.
“ O estudo destaca o que é possível alcançar com inteligência artificial e robótica cirúrgica ”, afirmou Danail Stoyanov, do University College London.
Ji Woong “Brian” Kim, principal autor do artigo e atualmente em Stanford, destacou que “ os modelos de IA podem ser confiáveis o suficiente para permitir autonomia cirúrgica — algo que parecia distante, mas agora é uma realidade comprovada ”.
Desafios para uso em pacientes reais
Apesar dos avanços, ainda há desafios para aplicar essa tecnologia em cirurgias humanas, segundo especialistas. “ Para que seja viável em pacientes reais, os sistemas regulatórios precisarão avançar no mesmo ritmo ”, observou Ferdinando Rodriguez y Baena, do Imperial College London.
Os próximos passos da equipe envolvem expandir os testes para outros tipos de cirurgia e, futuramente, operar de forma autônoma em animais vivos, considerando fatores como respiração e sangramento, que tornam o ambiente ainda mais complexo.







